本記事にはアフィリエイト広告が含まれます。
この記事で分かること
- 産業用ロボットの直交座標系が「なぜメーカーによって違うのか」
- FANUC・安川・KUKA・ABB・三菱電機・川崎の座標系と姿勢表現の比較
- 複数メーカー混在ラインで実際にハマった落とし穴と対策
執筆者の実務経験: 三菱電機(MELFA)・川崎重工業のロボットについてティーチング経験あり。FANUCについてはオフラインプログラム(OLP)を含む実務経験あり。三菱と川崎が混在するラインでのティーチングペンダント操作も経験しており、座標系の違いによる操作ミスのリスクを現場で実感しています。安川・KUKA・ABBについては公式マニュアルおよび技術資料をもとに解説します。
そもそも直交座標系とは
産業用ロボットを動かすとき、ティーチングペンダントやオフラインプログラムでは必ず 直交座標系(ワールド座標系・ベース座標系) が登場します。X・Y・Zの3軸と、それぞれの軸まわりの回転を組み合わせることで、ツール先端(TCP)の位置と姿勢を表現します。
国際規格としてはISO 9283やIEC 61800シリーズが参照されますが、各メーカーはこれを独自に解釈・実装しています。そのため現場では「同じ方向に動かしたつもりが、メーカーが変わったら逆に動いた」というトラブルが後を絶ちません。
重要: 直交座標系の「向き」はロボット安全教育の中でも軽視されがちですが、誤認識は衝突事故に直結するリスクです。特に複数メーカー混在ラインでは必ず確認してください。
主要メーカーの座標系を比較する
代表的なメーカーのベース座標系(ロボット設置面を基準とした座標系)の定義を見ていきます。
位置(XYZ)は「ほぼ共通」
Z軸を鉛直上向き、X軸をロボット正面方向、Y軸は右手系で自動決定——この基本構造は主要メーカー間でおおむね共通しています。
X軸:ロボット正面方向 →
Y軸:右手系により自動決定
機種により回転表記が混在
⚠ 仕様書での確認必須
回転表記はオイラー角(A/B/C)
A=Z回転、B=Y回転、C=X回転
姿勢表現にクォータニオンを採用
RAPIDではOrient型で記述
ただし「X軸の正方向=正面がどっち向きか」は機種・設置条件によって変わる場合があります。特に安川電機は機種依存の傾向があり、導入前に仕様書での確認が必須です。
姿勢(回転表現)は「メーカーごとに大きく異なる」
位置が比較的共通なのに対し、姿勢の表現方法は各社で大きく異なります。大きく2系統に分かれます。
| 系統 | 採用メーカー | 特徴 |
|---|---|---|
| オイラー角(各軸の回転角で表現) | FANUC・安川・KUKA・三菱・川崎 | 直感的だが回転順序の定義がメーカーごとに異なる |
| クォータニオン(四元数で表現) | ABB(RAPID言語) | 特異点がなく計算精度が高い。直感的理解は難しい |
メーカー別の姿勢表現と回転定義
FANUC:W/P/R表記
FANUCはオイラー角をW(Yaw/ヨー)・P(Pitch/ピッチ)・R(Roll/ロール)で表します。Z→Y→Xの順に回転を適用するZYX系です。国内シェアが高く、FA業界の「デファクトスタンダード」的な存在のため、他社との比較基準になりやすいです。
安川電機(Motoman):Rx/Ry/Rz表記
FANUCと同様の右手系で、回転をRx・Ry・Rzで表現します。DX200・YRC1000コントローラの標準的な姿勢表現はRx・Ry・Rz表記で、回転順序はZ→Y→Xです。これはFANUCのW/P/Rと同じ回転順序であるため、基本的な座標系の感覚は比較的近いです。 ただし、多層盛り溶接(Multilayer Weld)オプションを有効にした環境では、ペンダントの位置表示がA/B/C形式に切り替わります。 このオプションは無効化も可能ですが、溶接用途の設備を引き継ぐ際はペンダントの表示形式を事前に確認してください。「同じ安川なのに表示がA/B/Cになっている」という状況はこのオプションが原因です。
KUKA:A/B/C表記
KUKAのKRL言語はA・B・Cというアルファベットで回転を表現します。定義はA=Z軸回転(ヨー)、B=Y軸回転(ピッチ)、C=X軸回転(ロール)で、回転順序はZ→Y→Xです。
⚠ 三菱電機との「同名異義」に要注意(後述)
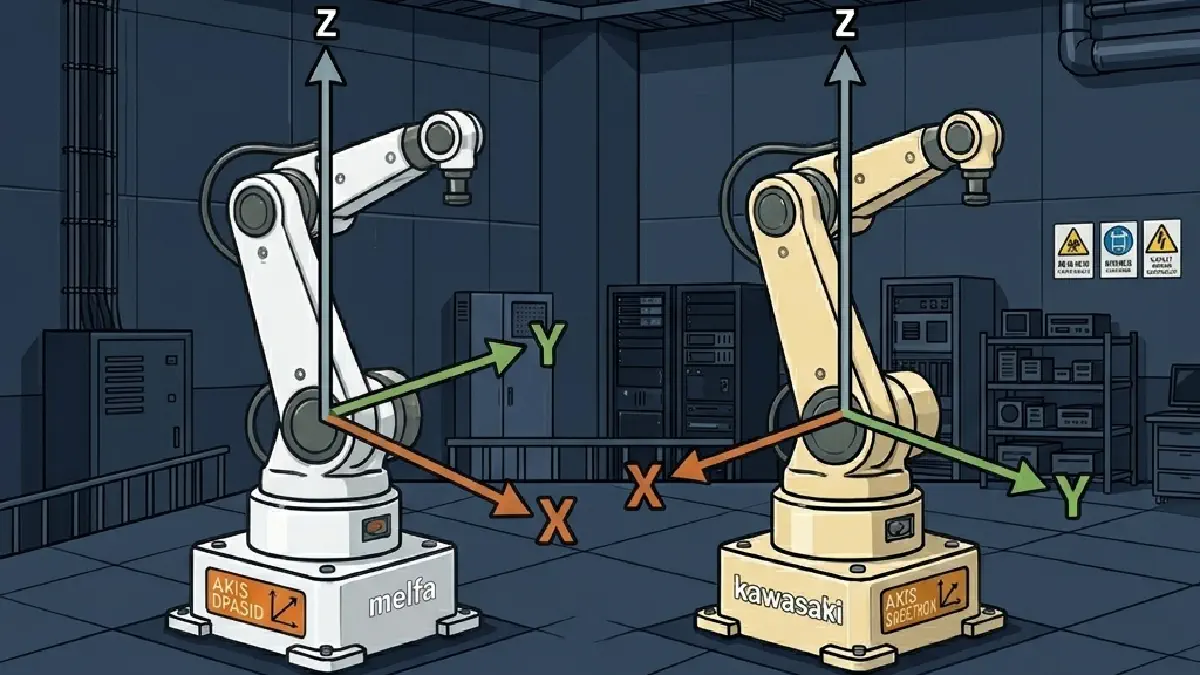
各社の「正面方向」を俯瞰図で比較する
真上から見た俯瞰図です。川崎だけ 正面方向がY+ で他社(正面=X+)と90°異なります。
川崎固有の注意点: 川崎ロボット(RSシリーズ等)は正面方向がY+、ケーブル取り出し口が−Yと定義されています。FANUCや三菱と混在するラインでは「X方向へジョグ」したときの動作方向が90°ずれるため、ティーチング引き継ぎや座標変換時に特に注意が必要です。
ABB:クォータニオン(RAPID言語のOrient型)
ABBだけが他社と根本的に異なる姿勢表現を採用しています。RAPID言語ではOrient型という四元数(クォータニオン)でTCPの姿勢を記述します。特異点がなく、連続したパス動作に強みを持ちます。ただしオイラー角に慣れたエンジニアには直感的に扱いにくく、変換ツールなしに他社形式と相互変換しようとすると意図しない姿勢になります。
川崎重工業:O/A/T表記(AS言語)
川崎ロボットが使うAS言語は1970年代から継承された独自体系で、ツール姿勢を O(Orientation)・A(Approach)・T(Tool rotation) で表します。方向の概念はZYXオイラー角と等価ですが、用語が全く異なります。
実務で使った印象: O/A/TはFANUCのW/P/Rと「意味するものは同じだが名前が違う」という関係です。変換式は単純ですが、初めて触ったときは「なんでAがヨーじゃないんだ」と混乱しました。半導体製造装置やクリーンルーム対応モデルが充実しており、そうした設備との親和性が高いです。
三菱電機(MELFA):A/B/C表記——KUKAとは別物
三菱電機のMELFA-BASICもA/B/Cという回転角表記を採用しています。ところがKUKAのA/B/CとはAとCの定義が逆転しており、回転順序も異なります。
| パラメータ | KUKA (KRL) | 三菱電機 (MELFA) |
|---|---|---|
| A | Z軸回転(ヨー) | X軸回転(ロール) |
| B | Y軸回転(ピッチ) | Y軸回転(ピッチ) |
| C | X軸回転(ロール) | Z軸回転(ヨー) |
| 回転順序 | Z → Y → X | X → Y → Z |
同じアルファベットが使われているため混同しやすく、複数メーカー混在ラインでオフラインプログラムを移植するときに最も誤りが起きやすい組み合わせの一つです。必ずリファレンスマニュアルで定義を確認してください。
回転角パラメータの定義を図で比較する
各メーカーが「同じ姿勢」を表現するとき、どの軸をどの名前で回すかを図示します。川崎・KUKA・三菱の3社で回転の名前の付け方が全く異なります。
KUKAと三菱のA/B/Cは同じ文字でも定義が逆です。 KUKAのA=Z軸(ヨー)に対し、三菱のA=X軸(ロール)。回転順序もZ→Y→XとX→Y→Zで正反対です。
なぜメーカーごとに違うのか
1. 規格策定前からの独自開発
多くのメーカーが国際規格の整備より前に独自のコントローラを開発しており、その仕様が現在も引き継がれています。
2. 後方互換性の維持
既存ユーザーの資産(プログラム・治具・設備設計)を守るため、仕様変更は困難です。一度固まった座標系は事実上変更できません。FANUCが1980年代に確立した仕様が今も基本的に変わっていないのはその典型です。
3. 用途特化による最適化
溶接・塗装・ハンドリングなど用途によって操作しやすい回転表現が異なり、メーカーの得意分野が仕様に反映されています。
4. ISO規格の解釈の幅
ISO規格自体が一部の定義を各社の裁量に委ねているため、同じ規格を参照していても実装に差異が生まれます。
現場での落とし穴と対策
筆者が実際に経験したこと:三菱×川崎混在ラインのティーチング
三菱(MELFA)と川崎が同一ライン上に混在している設備で、両方のロボットをティーチングする機会がありました。
ジョイントモード(J1・J2…と各軸を個別に動かすモード)では、メーカー間の違いはさほど気になりません。 各軸番号に対して腕が動く感覚はどのメーカーも大きくは変わらないためです。
問題が起きるのは直交座標系モード(ワールド座標系・ベース座標系でTCPを直線移動させるモード)に切り替えたときです。三菱MELFAの感覚のまま川崎のペンダントで直交ジョグを操作すると、X方向に動かしたつもりがY方向に動くという状況が発生します。三菱と川崎ではベース座標系のX軸とY軸の向きが入れ替わっているためです。
これは数値入力での微小移動でも同様です。「ワールド座標系でX軸方向に+0.5mm調整したい」という場面で、三菱MELFAの感覚のまま川崎側を操作すると、動くのはX方向ではなくY方向になります。
0.5mmという慎重な微小移動を選んでいても、軸の割り当て自体が入れ替わっているため全く別の方向に動きます。「少しずつ動かして確認する」という手順は安全確認として正しいのですが、座標系の向きを誤認識したまま行うと意味をなしません。 直交座標系モードに切り替える前に、必ず「今操作しているロボットのX/Y方向はどちらか」を確認する習慣が不可欠です。
この経験から、混在ラインでは各ロボットの架台や架台周辺の見やすい場所に、そのロボットのX/Y/Z軸の向きを矢印で表示した銘板やラベルを貼っておくことを強くお勧めします。慣れている人間が確認のために使うだけでなく、初めてそのロボットを触る人へのミス防止にも有効です。
よくある失敗パターン(一般的な事例)
- FANUCで作ったオフラインプログラムを安川ロボットに適用し、姿勢が意図しない向きになる(回転表現の定義差による)
- KUKAのA/B/C角をFANUCのW/P/R欄にそのままコピーして予期せぬ動作(回転軸の定義・順序が異なるため)
- 三菱MELFAのA/B/CをKUKAのA/B/Cと同一視してプログラムを流用する(表記が同じだが定義が異なる)
- ABBのクォータニオンを変換ツールなしにオイラー角へ書き換えて誤差が発生
- 複数メーカー混在ラインで、ロボット移設後に座標系の再設定を忘れて干渉
特に注意: 倒立設置・壁付け設置の場合、重力方向とZ軸の関係が変わるため座標系の再定義が必須です。ベース座標系と世界座標系の混同も要注意です。
対策チェックリスト
- 混在ラインでは各ロボット架台にX/Y/Z軸方向の銘板・ラベルを貼る(操作前の確認習慣とミス防止の両方に効く)
- メーカー乗り換え・移植時は姿勢表現の変換計算を必ず実施(専用変換ツールを使用)
- オフラインティーチングソフトの座標系設定を導入前に確認する
- 各ロボットのベース座標系をCADデータに正確に登録する
- 回転順序(Intrinsic/Extrinsic)をプロジェクト仕様書に明記する
- 三菱MELFAとKUKAが混在するラインでは、A/B/Cの定義を設備ドキュメントに必ず記載する
座標系の誤認識は、通常運転時だけでなく異常停止からの復帰動作でも起こり得ます。特に、非常停止後にロボットを安全位置へ退避させる際は、どの軸がどの方向に動くかを正しく把握していないと、退避のつもりが干渉に直結しかねません。異常停止後の復帰シーケンス設計全般についてはPLC異常停止後に安全復帰する設計方法|非常停止・ロボット設備で事故を防ぐ考え方で詳しく解説しています。
ROS活用のヒント: 最近ではROS(Robot Operating System)の普及により、メーカーを問わず REP 103準拠(X前・Y左・Z上) で統一するシステム設計も増えています。新規ライン設計では採用を検討する価値があります。
3Dビジョンを使ったロボットピッキングでは、カメラ座標系とロボットベース座標系の変換(ハンドアイキャリブレーション)の精度が、そのままワークの認識・吸着精度に直結します。実際にMech-Mindの3Dビジョンでばら積みワークをピッキングした検証事例は、Mech-Mindを使った3Dピッキング実践レビュー|ばら積みワークの認識と吸着を検証で紹介しています。
まとめ
まとめ
産業用ロボットの直交座標系は、位置(X/Y/Z)はほぼ共通の右手系ですが、姿勢の表現方法と回転順序がメーカーによって大きく異なります。
特に混在ラインで危険なのは、ティーチングペンダントのジョグ操作でX/Yの向きが違うことです。慣れているメーカーとは反対方向にロボットが動き出す状況は、咄嗟の操作判断を誤る可能性があります。架台への軸方向表示という地味な対策が、現場では最も確実なミス防止策です。
複数メーカー混在環境での座標変換の知識は、現代の自動化ライン設計における必須スキルです。ロボット更新・増設の際にはぜひ本記事を参考に、座標系の確認を最優先事項として取り組んでください。
参考・おすすめ書籍
ロボットプログラミングや座標変換の理解を深めたい方には以下の書籍が参考になります。

ロボット工学の基礎(第3版)